

全国咨询热线:021-54902525

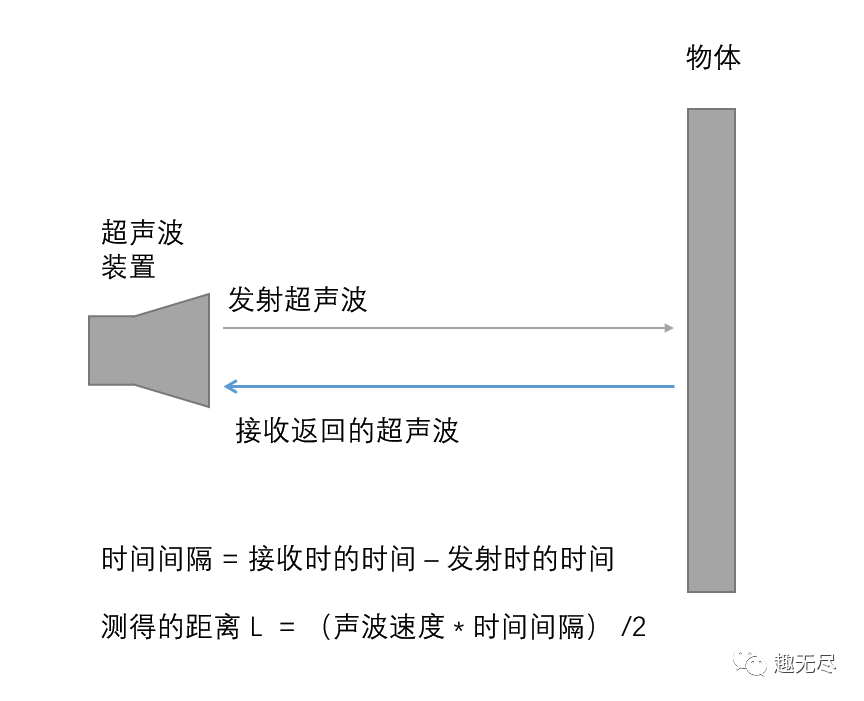
运用声响脉冲和简略的核算来确认其本身与前方物体之间的间隔。它们一般用于板,当与超声波传感器(例如 HC-SR04)等传感器结合运用时,Pico 成为丈量间隔、自动化运用的抱负渠道。下面咱们将了解如安在树莓派 Pico 上运用超声波传感器。
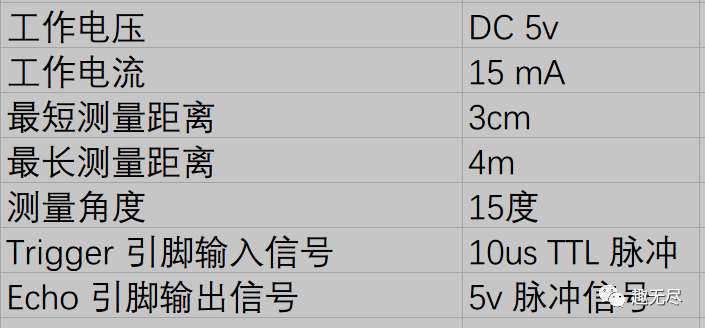
– Trig 引脚用于向传感器发送触发信号。当高电平信号(一般为 5V)施加到该引脚时,传感器开端发射超声波。
– Echo 引脚用于接纳来自传感器的回波信号。当传感器宣布的超声波击中物体并反弹回来时,传感器会在该引脚上发生脉冲。
2. HC-SR04 接纳到树莓派发送的脉冲信号,开端发送超声波 (start sending ultrasoun),并把 Echo置为高电平。然后预备接纳回来的超声波。
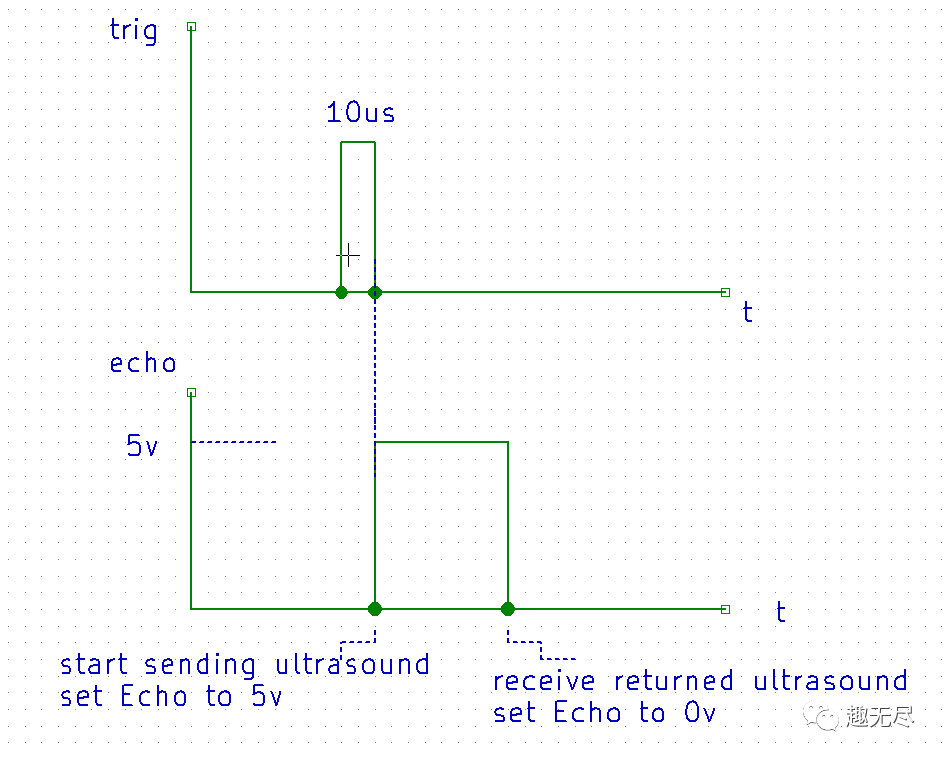
从上述进程可以精确的看出,Echo 高电平继续的时刻便是超声波从发射到回来所通过的时刻间隔~
1、从核算机库导入 Pin 类,然后导入 utime 库。前者用于操控 GPIO 引脚,后者是根据时刻的函数库。
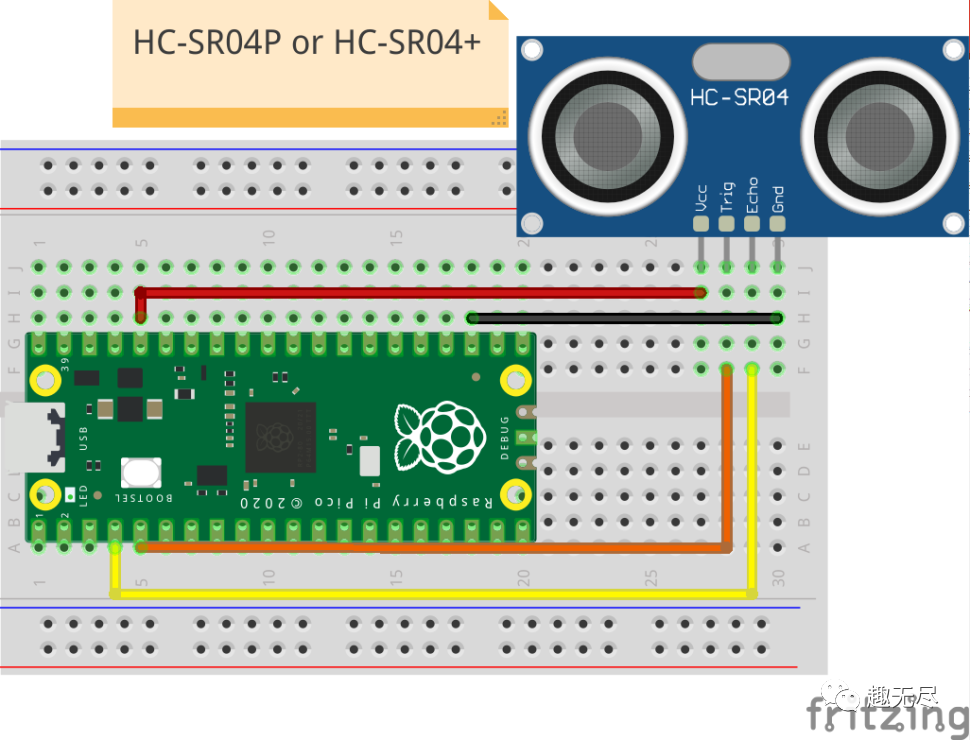
2、创立两个新目标,触发器和回声。这些目标装备要与超声传感器一同运用的 Pico 的 GPIO 引脚。例如,咱们的触发引脚用于发送电流脉冲,因而它是输出引脚。回波引脚接纳反射的脉冲,因而回波是输入。
5、在将触发器引脚拉低之前,将触发器引脚拉高五秒钟。这将从超声波传感器发送一个短脉冲,然后封闭该脉冲。
6、创立一个 while 循环以查看回波引脚。假如没有收到回波脉冲,则更新变量 signaloff,使其包括以微秒为单位的时刻戳。
7、创立另一个 while 循环,这次查看是否已收到回声。这会将当时时刻戳(以微秒为单位)存储到 signalon 变量中。
8、创立一个新的 timepass 变量,该变量将存储脉冲脱离传感器,碰击物体并作为回波回来传感器所花费的总时刻值。
9、创立一个新变量,间隔。此变量将存储方程式的答案。咱们将跋涉时刻(通过的时刻)乘以声速(343.2m/s,即每微秒 0.0343cm),该方程的乘积除以 2,由于咱们不需要总跋涉间隔,而只需从对立传感器。
将代码作为 code.py 保存到树莓派 Pico 上,然后单击 Run 按钮以运转代码。在 Python Shell 中,您将看到每秒打印的间隔。
 相关推荐
相关推荐